DOMAINS
協働ロボット × 3Dビジョンによる自動化検証 |ロボティクス
協働ロボット導入に向けたPoC
3Dビジョンによるバラ積みピッキング、協働ロボットによるハンドリングテストを通じて、自動化の可能性を検証します。
- 3Dビジョン
- バラ積み
- ピッキング
- ロボット
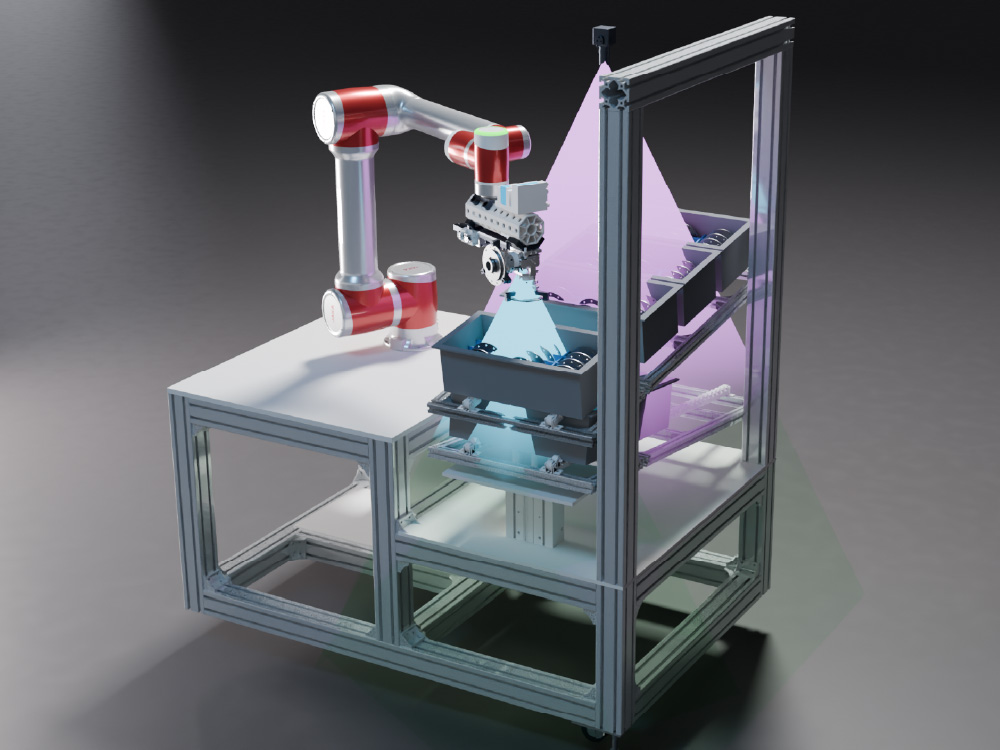



協働ロボットと3Dビジョンシステムを組み合わせ、複雑な形状のワークや、ランダムに配置されたバラ積みワークのピッキング精度・サイクルタイムを検証します。 導入前のPoCとして、実ワークを用いた把持テストや、ロボットの動作範囲の確認が可能です。
検証可能なこと
-
バラ積みピッキング
:
メッシュコンテナ内やパレット上のバラ積みワークの認識と取り出し。 -
多様なハンドリング
:
ロボットハンド(電動グリッパ、吸着ハンド等)を付け替え、把持安定性を確認。 -
サイクルタイム計測
:
認識〜把持〜配置までの一連の動作速度を計測。
主な使用機材
-
協働ロボット
:
JAKA Zu18 (可搬18kg) + 2Dカメラ実装 -
3Dビジョン
:
Mech-Mind / ALSONTECH / SpeedCam (SPEEDBOT) -
ロボットハンド
:
Agibot Omnihand Pro 他